|
Aquí encontrará páginas con información práctica y útil sobre robótica, así como trucos e ideas
tanto electrónicas como mecánicas. También incluimos tablas de conversión de medidas y modificación de servos, que poco
a poco se irán ampliando.
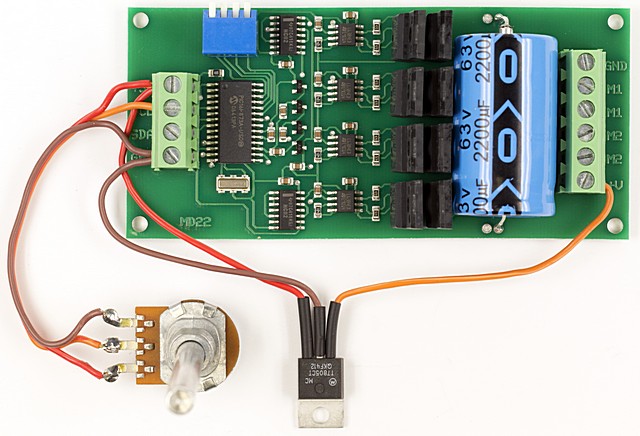
Control de velocidad y giro para motor de corriente continua.
En este tutorial vamos a ver como podemos controlar la velocidad y el sentido de giro de un motor de corriente continua.
Mas concretamente lo que haremos es montar un circuito que sea capaz de hacer todo ello con un simple potenciómetro
de forma que cuando el potenciómetro este en el centro el motor este parado y cuando se gira el potenciómetro a los lados
el motor gira a cada lado de forma regulada.
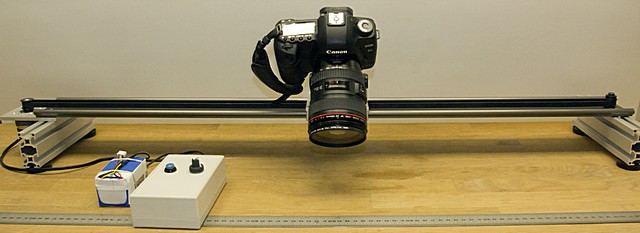
Carril motorizado para fotografía y vídeo
En esta ocasión vamos a abordar la construcción de un carril motorizado para fotografía y video, también llamado
slider motorizado. La idea es construir un sistema de desplazamiento lineal que sea lo suficientemente suave y preciso
como para tomar fotografías a intervalo (time lapse) o simplemente hagamos un desplazamiento de la cámara de video.

Trabajar con Servos
Los servos son sin duda uno de los dispositivos mas útiles para cualquier aficionado a la robótica, ya que nos permiten crear toda clase movimientos de
una forma controlada. En este tutorial vamos a mostrar que es un servo, como funciona y como podemos utilizarlos en nuestros proyectos, siempre desde un
punto de vista práctico aplicado a la robótica personal.
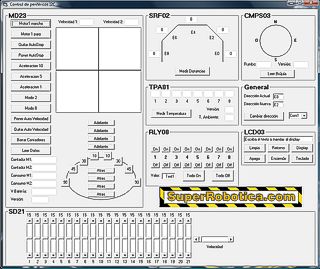
Control de circuitos I2C desde un PC por USB
Muchas veces resulta difícil sacar partido a los circuitos con interfaz I2C, ya que la mayoría de las veces no tenemos donde conectarlos
y ni siquiera podemos probarlos. Otras veces es usual encontrar un circuito idoneo para lo que queremos pero no sabemos como utilizarlo ni como sacar partido
del mismo ya que solo cuenta con un bus I2C que resulta difícil y desconocido para mucha gente. Con el programa en Visual Basic que proponemos,
no solo tendremos la posibilidad de conectar múltiples circuitos al PC, si no que incluso mostraremos como hacerlo de forma inalámbrica con
una sola conexion USB. Ahora podrá utilizar todos estos interesantes circuitos en sus proyectos, aunque no sepa nada de programación.
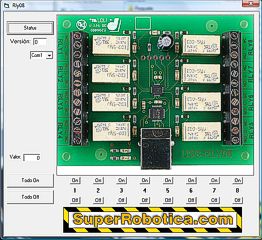
Control de 8 reles desde un PC con conexion USB
Desde la aparición del nuevo circuito de control de servos USBRLY08 es aun mas fácil controlar reles desde el PC pues ya no hace falta el
circuito I2C ya que el circuito incluye la interfaz USB por lo que solo hay que conectarlo al PC con un cable y utilizar este programa para controlar los
reles de forma fácil y sencilla.
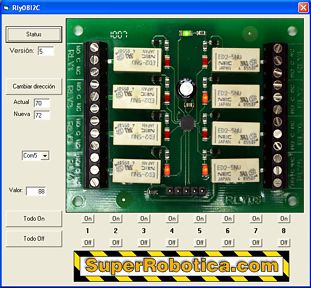
Control de 8 reles desde un PC con conexion USB y bus I2C
En esta ocasion se trata de controlar 8 reles desde un PC con conexion USB, para ello se emplea el circuito de control de reles RLY08 conectado al un
USBI2C que hace de interfaz con el ordenador y proporciona la alimentación necesaria para el funcionamiento del circuito. Se incluye un programa
de ejemplo en Visual Basic junto con su código fuente que enseña como controlar los relés desde el PC a la vez que muestra en la pantalla
el estado de los relés de forma gráfica.

Sonar múltiple de ultrasonidos con conexión a PC
El multisonar es una aplicación en la que se muestra como conectar varios sensores de ultrasonidos a un PC para realizar un sonar que cubre 180
grados con la ayuda de 9 sensores SRF02 y un circuito USBI2C que lo conectan al PC. La aplicación está realizada en Visual Basic e incluye
el código fuente de la misma. Con este ejemplo se muestra lo fácil que es conectar dispositivos I2C al pc gracias al circuito USBI2C.
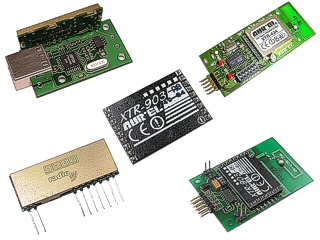
Transmisión de datos vía radio utilizando radio módem
Sección en la que se detalla como utilizar los circuitos transmisores y radiomodem de nuestro catálogo para transmitir y recibir datos entre
el PC y el robot. Se incluye un programa en Visual Basic para el PC y otro en BasicX para el robot que sirven de ejemplo de como hacer la transmisión
de datos. También se incluyen esquemas de conexión de los diferentes circuitos.

Control Autónomo para Circuito MiniSCC II
En esta pagina se muestra como controlar un brazo robot de 6 ejes de forma autónoma y sin necesidad de ordenador. La idea es utilizar un microcontrolador
BasicX24 que manda al circuito de control de servos MiniSSC II las mismas ordenes que manda el PC desde el programa Visual SC2. Con la ayuda de este programa
se crean los movimientos y se guardan en un archivo que posteriormente se graba en el microcontrolador BasicX24 y este lo ejecuta cada vez que se pulsa
un botón. Con el circuito propuesto, puede controlar hasta 4 programas o movimientos diferentes, y todo ello sin soldar ni un solo cable.

Modificación Servo Hitec HS422
El servo Hitec HS422 esta ganando mucha popularidad entre los aficionados a los robots gracias a su facilidad para convertirlo en rotación continua.
En este tutorial enseñamos paso a paso como realizar esta modificación para utilizar el servo como motor de tracción

Modificación Servo MX-400
El servo MX-400 resulta el mas sencillo y rápido de modificar para rotación continua. Esto junto con unas buenas características
técnicas y un excelente precio, lo convierten en el candidato ideal para las aplicaciones de robótica. En este tutorial enseñamos
paso a paso como realizar esta modificación para utilizar el servo como motor de tracción con rotación continua.
Conversión de Medidas
Si ya estas arto de no comprender las características técnicas de algunos equipos por que están en otro sistema de medidas diferente
al métrico, consulta estas útiles tablas que te permiten pasar de una medida a otra fácilmente.
Sistemas de Televisión y Eléctricos del Mundo.
En esta completa tabla hemos recogido los diferentes sistemas de televisión usados en cada país, así como la tensión y la
frecuencia de la red eléctrica local. Si vas a viajar con tu robot, no olvides comprobar que tanto las cámaras como la alimentación
son correctas.
|