|

SRF08 es un medidor ultrasónico de distancias para robots que representa la ultima generación en sistemas
de medidas de distancias por sonar, consiguiendo niveles de precisión y alcance únicos e impensables
hasta ahora con esta tecnología. El sensor es capaz de detectar objetos a una distancia de 6 m con facilidad
ademas de conectarse al microcontrolador mediante un bus I2C, por lo que se pueden conectar cuantos sensores sean
necesarios en el mismo bus. Con una alimentación unica de 5V, solo requiere 15 mA, para funcionar y 3mA mientras
esta en reposo, lo que representa una gran ventaja para robots alimentados por pilas. El sensor SRF08 Incluye además
un sensor de luz que permite conocer el nivel de luminosidad usando igualmente el bus I2C y sin necesidad de recursos
adicionales.
Mejoras del SRF08 con respecto al sensor ultrasónico SRF04
El medidor de distancias ultrasónico SRF08 supone un paso más allá del modelo SRF04, ya que
ha sido desarrollado con las siguientes mejoras respecto de su hermano pequeño el SRF04.
Los principales características a mejorar son:
1. El alcance máximo de 3m del srf04 puede ser insuficiente en algunas situaciones.
2. El tiempo de desconexión de 36mS + 10mS de recarga es bastante largo - equivale a casi 8m en un producto
de 3m de alcance.
3. El modelo SRF04 requiere 2 pines I/O por sonar. 32 líneas I/O para un sistema de 16 sonares.
4. Es necesario un procesador o controlador principal que mida el tiempo de retorno de eco.
5. La consumo de corriente máxima de 50mA es demasiado alto - 800mA para 16 sonares.
6. Sólo es posible un único eco de retorno.
7. El modelo SRF04 no puede medir el nivel de iluminación.
El límite de 3m del modelo SRF04 está impuesto por la necesidad de no tener una ganancia tan alta que
el acoplamiento cruzado entre transmisión y emisión provoque una saturación de los amplificadores
operacionales en el rango de alcance. En caso de que se produzca, el sistema no pude diferenciar un acoplamiento del
emisor, de un eco de retorno auténtico. Por su parte, el modelo SRF08 utiliza un potenciómetro digital
para variar la ganancia a medida que aumenta el rango. Esto permite una ganancia global superior y como consecuencia
un alcance mejor. El alcance típico es de 6m y se han hecho pruebas configurando la ganancia para llegar hasta
11m frente a un objeto grande. Este sensor es extremadamente sensible, llegando a detectar objetos cercanos y pequeños,
como pueden ser anomalías en el suelo, que el robot realmente debería ignorar. Por lo tanto, la ganancia
se ha reducido deliberadamente a aproximadamente 6m.
El tiempo de desconexión de 36mS del sensor SRF04 viene impuesto porque el procesador PIC12C508 se utiliza
sólo como un único temporizador, y se utiliza como un detector de tonos para el eco de retorno. El temporizador
guardián (el watchdog) se utiliza para calcular el tiempo de desconexión. Este temporizador se puede
configurar solamente en incrementos de 18mS. Así, mientras que 18mS es suficiente - alrededor de 3m de alcance
- es un valor "teórico" y no está garantizado, por lo que el tiempo real podría ser
menos en función de la temperatura ambiental y de las tolerancias del chip. Se necesitan 10mS adicionales para
recargar los generadores de +/- 10v para el amplificador operacional y el comparador. El max232 se desactiva durante
el cálculo de tiempo del eco para reducir el ruido en los amplificadores operacionales. Con el sensor SRF08,
se ha cambiado el circuito analógico a un suministro único de 5v, por lo que el max232 (en realidad
un ST232) no necesita cargar un condensador de 22uF, sino sólo de 100n. El tiempo de recarga ahora se reduce
a sólo 600uS y es el procesador el que se ocupa de toda el trabajo de manera automática cuando se solicita
una nueva lectura del tiempo.
Un cambio en el procesador desde PIC12C508 a un PIC16F872 en el srf08 implica que están disponibles un mayor
número de temporizadores y que el sensor SRF08 no se bloquee con el temporizador guardián de 36mS. Sin
embargo, uno de los problemas derivados de terminar el proceso pronto es que el "ping" en curso desconoce
esto. El ping rebota normalmente en un muro lejano y regresa. No obstante si en algún caso regresa justo después
de que haya iniciado una nueva medición de la distancia, el sonar tomará el primer "ping"
y pensará que hay un objeto mucho más cerca de lo que en realidad está. El sensor permite que
la ganancia máxima esté limitada para reducir esta posibilidad.
El número de líneas I/O que necesita un sonar de múltiples sensores ha sido un tema complicado
para algunos usuarios. También hay un problema con el controlador basic stamp, que no trata de igual manera
todas las líneas I/O cuando realiza el cálculo del rango. Al utilizar 16 sonares, son necesarias las
32 líneas I/O. Esto se puede reducir a 17 direccionando las 16 salidas de pulsos de eco juntas con 16 diodos.
Se puede obtener una reducción a 6 líneas I/O utilizando un decodificador de 4 a 16 líneas como
el CD4514B. Para ello, el usuario deberá construir un circuito adicional. El sensor SRF08 utiliza una interfaz
I2C por lo que los 16 sonares pueden ser controlados utilizando únicamente 2 líneas I/O. La interfaz
bus I2C está disponible en la mayoría de los controladores estándar, tales como el BasicX-24,
OOPic, y otros controladores más económicos como la familia PIC y Atmel.
En el sensor SRF04, el procesador principal de los usuarios deben calcular el tiempo del eco de retorno. Esto ha
sido un problema con los controladores Basic Stamp, ya que no trata de igual manera todas las líneas I/O. El
sensor SRF08 realiza el cálculo de la distancia de forma interna y envía el resultado ya resuelto.
La corriente máx. de 50mA que el SRF04 necesita, aun siendo mucho mejor que los 150mA (2.5A de pico) de las
unidades de Polaroid, ha sido reducido a una corriente nominal de 15mA y alrededor de 3mA en modo de reposo. El sensor
SRF08 entra automáticamente en modo de reposo una vez que ha finalizado cada medición, y se activa de
nuevo cuando recibe el siguiente comando.
Debido al modo de funcionamiento del sensor SRF04, sólo se puede recibir un único eco. Después
de esto, el módulo alimenta sus generadores de +/- 10v de nuevo para que están listos para el próximo
pulso de activación. Con SRF08 se pueden recibir múltiples ecos. Un buffer almacena los primeros 16
ecos recibidos. Lo ideal es ser capaz de ver más allá de las puertas, mientras que los sensores estándar
sólo verían el marco de la puerta.
Por último, para ampliar el uso del sensor SRF08, se ha incluido un célula fotoeléctrica para
medir la luz ambiental, que puede leerse a través del bus I2C de igual forma que los datos del sonar.

Controlando el sensor de distancias ultrasónico SRF08
La comunicación con el sensor ultrasónico SRF08 se realiza a través del bus I2C. Este está
disponible en la mayoría de los controladores del mercado como BasicX-24, OOPic y Basic Stamp 2P, así
como en una amplia gama de microcontroladores. Para el programador, el sensor SRF08 se comporta de la misma manera
que las EEPROM de las series 24xx, con la excepción de que la dirección I2C es diferente. La dirección
por defecto de fábrica del SRF08 es 0xE0. El usuario puede cambiar esta dirección con 16 direcciones
diferentes: E0, E2, E4, E6, E8, EA, EC, EE, F0, F2, F4, F6, F8, FA, FC o FE, por lo que es posible utilizar hasta
16 sensores sobre un mismo bus I2C. Además de las direcciones anteriores, todos los sonares conectados al bus
I2C responderán a la dirección 0 -al ser la dirección de atención general. Esto significa
que escribir un comando de medición de la distancia para la dirección 0 de I2C (0x00) iniciará
las mediciones en todos los sensores al mismo tiempo. Esto debería ser útil en el modo ANN (Véase
a continuación). Los resultados deben leerse de manera individual de cada uno de las direcciones reales de
los sensores. Disponemos de ejemplos del uso de un módulo SRF08 con una amplia gama de controladores del mercado.
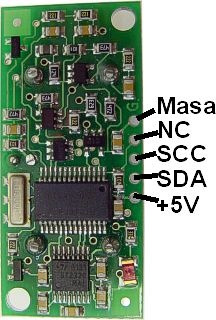
Conexiones
El pin señalado como "Do Not Connect" (No conectar) debería permanecer sin conexión.
En realidad, se trata de la línea MCLR de la CPU y se utiliza solamente en la fabrica para programar el PIC16F872
después del montaje, dispone de una resistencia interna de tipo pull-up. Las líneas SCL y SDA deberían
tener cada una de ellas una resistencia pull-up de +5v en el bus I2C. Sólo necesita un par de resistencias
en todo el bus, no un par por cada módulo o circuito conectado al bus I2C. Normalmente se ubican en el bus
maestro en vez de en los buses esclavos. El sensor SRF08 es siempre un bus esclavo - y nunca un bus maestro. Un valor
apropiado seria el de 1,8 K en caso de que las necesitase. Algunos módulos como el OOPic ya disponen de resistencias
pull-up por lo que no es necesario añadir ninguna más.
Registros
El sensor SRF08 tiene un conjunto de 36 registros.
| Ubicación |
Lectura |
Escritura |
| 0 |
Revisión de Software |
Registro de comando |
| 1 |
Sensor de luz |
Registro de ganancia máx. (por defecto 31) |
| 2 |
Byte alto de 1º eco |
Registro de alcance de distancia (por defecto 255) |
| 3 |
Byte alto de 2º eco |
No disponible |
| ---- |
---- |
---- |
| 34 |
Byte alto de 17º eco |
No disponible |
| 35 |
Byte bajo de 17º eco |
No disponible |
Solamente se puede escribir en las ubicaciones 0, 1 y 2. La ubicación 0 es el registro de comandos y se utiliza
para iniciar la sesión de cálculo de la distancia. No puede leerse. La lectura de la ubicación
da como resultado la revisión del software de SRF08. Por defecto, la medición dura 65mS, aunque puede
cambiarse modificando el registro de alcance de la ubicación 2. Si lo hace, tendrá que cambiar la ganancia
analógica en la ubicación 1. Consulte las secciones siguientes relacionadas con el cambio de medición
y ganancia analógica.
La ubicación 1 es el sensor de luz en placa. Este dato se actualiza cada vez que se ejecuta un comando de
medición de distancia y se puede leer cuando se leen los datos de la medición. Las dos ubicaciones siguientes,
2 y 3, son resultados sin signo de 16 bits de la última medición - el nivel lógico alto en primer
lugar. El significado de este valor depende del comando utilizado, y puede estar expresado en pulgadas, o en centímetros,
o bien el tiempo de vuelo del ping expresado en uS. Un valor cero indica que no se ha detectado objeto alguno. Hay
hasta 16 resultados adicionales que indican los ecos de objetos más lejanos.
Comandos
Existen tres comandos para iniciar una medición de distancia (desde 80 hasta 82), que devuelve el resultado
en pulgadas, centímetros o microsegundos. Asimismo, también existe un modo ANN (Artificial Neural Network)
que se describe a continuación y un grupo de comandos para modificar la dirección de I2C del srf08.
| COMANDOS |
ACCIÓN |
| Decimal |
Hexadecimal |
| 80 |
0X50 |
Modo cálculo distancia - Resultado en pulgadas |
| 81 |
0X51 |
Modo cálculo distancia - Resultado en centímetros |
| 82 |
0X52 |
Modo cálculo distancia - Resultado en microsegundos |
| 83 |
0X53 |
Modo ANN - Resultado en pulgadas |
| 84 |
0X54 |
Modo ANN - Resultado en centímetros |
| 85 |
0X55 |
Modo ANN - Resultado en micro-segundos |
| 160 |
0XA0 |
1º en la secuencia para cambiar la dirección I2C |
| 165 |
0XA5 |
3º en la secuencia para cambiar la dirección I2C |
| 170 |
0XAA |
2º en la secuencia para cambiar la dirección I2C |
Modo de cálculo de distancia con el SRF08
Para iniciar la medición de la distancia, deberá escribir uno de los comandos anteriores en el registro
de comando (registro 0) y esperar el tiempo necesario para la ejecución de la operación. A continuación,
deberá leer el resultado en el formato que desee (pulgadas, centímetros, etc). El búfer de eco
se pone a cero al comienzo de cada medición. La primera medición del eco se coloca en las ubicaciones
2 y 3, la segunda en 4 y 5, etc. Si una ubicación (niveles altos o bajos de bytes) es 0, entonces no se encontrará
ningún otro valor en el resto de los registros. El tiempo recomendado y establecido por defecto para realizar
la operación es de 65mS, sin embargo es posible acortar este periodo escribiendo en el registro de alcance
antes de lanzar el comando de medición. Los datos del sensor de luz de la ubicación 1 se actualizarán
también después del comando de medición.
Modo ANN
El modo ANN (Artificial Neural Network) ha sido diseñado para proporcionar datos múltiples de un modo
en el que es más fácil entrar en una red neural, o al menos eso es lo que se pretende - aunque aún
no se ha hecho. El modo ANN ofrece un búfer de 32 bytes (ubicaciones de 4 a 35 inclusive) en el que cada byte
representa el tiempo máximo de vuelo 65536uS dividido por 32 tramos de 2048uS cada uno - equivalente a aproximadamente
352mm de alcance. Si se recibe un eco en uno de los espacios de tiempo de bytes, a continuación se fijará
en un valor diferente a cero, para que no sea cero. Por lo tanto si se recibe un eco desde los primeros 352mm, la
ubicación 4 será diferente a cero. Si se detecta un objeto a 3 metros de distancia, la ubicación
12 será diferentes de cero (3000/352 = 8) (8+4=12). Organizar los datos de esta manera sería mejor para
una red neural que para otros formatos. La entrada a su red debería ser 0 si el byte es cero y 1 si es diferente
de cero. En el futuro, se pretende organizar un mapa SOFM (Self Organizing Feature Map) para la red neural, aunque
se espera que sea aplicable para cualquier tipo de red.
| Ubicación 4 |
Ubicación 5 |
Ubicación 6 |
Ubicación 7 |
Ubicación 8 |
| 0-352mm |
353-705mm |
706-1057mm |
1058-1410mm |
En adelante |
Cómo comprobar que una medición ha finalizado
No es necesario utilizar un temporizador en su propio controlador para saber que la medición ha terminado.
Puede aprovechar la ventaja que le ofrece el hecho de que el sensor SRF08 no responde a ninguna otra actividad I2C
mientras está realizando la medición. Por lo tanto, si intenta leer el valor en el sensor SRF08 (utilizamos
el número de revisión de software en la ubicación 0) por lo que recibirá 255 (0xFF) durante
la medición. Esto se debe a que la línea de datos I2C (SDA) se eleva si nada lo está controlando.
Tan pronto como finaliza la medición el sensor SRF08 responderá de nuevo al bus I2C, por lo que deberá
esperar a que desaparezca el valor 255 (0xFF) en el registro. A continuación, podrá leer los datos del
sensor. El controlador puede aprovechar esta ventaja para realizar otras tareas mientras el SRF08 está realizando
la medición.
Cómo cambiar el rango de alcance
El alcance máximo del sensor SRF08 está controlado por el temporizador interno. Por defecto, este es
65mS o el equivalente a 11 metros de alcance. Esto supera los 6 metros de los que el SRF08 es realmente capaz de ofrecer.
Es posible reducir el tiempo que espera el sensor SRF08 a escuchar un eco, y por lo tanto el alcance, modificando
el registro range en la ubicación 2. El alcance puede regularse en pasos de aproximadamente 43mm (0,043 metros
o 1,68 pulgadas) hasta llegar a los 11 metros. El alcance es ((Range Register x 43mm) + 43mm) por lo que fijar este
registro (Range Register) en el valor 0 (0x00) ofrece un alcance máximo de 43mm. Fijar el registro Range Register
en el valor 1 (0x01) ofrece un alcance máximo de 86mm. En un ejemplo más útil, el valor 24 (0x18)
ofrece un alcance de 1 metro mientras que el valor 140 (0x8C) da 6 metros. El valor 255 (0xFF) ofrece los 11 metros
originales(255 x 43 + 43 es 11008mm).
Existen dos razones por las que es positivo reducir el tiempo de medición.
1. Para obtener la información sobre el alcance en menos tiempo
2. Para poder realizar mediciones con el sensor SRF08 a una tasa más rápida.
Si lo único que desee en recibir en menos tiempo, la información sobre el alcance y pretende realizar
las mediciones a una tasa de 65ms o más lento, todo funcionará de manera correcta. Sin embargo, si desea
lanzar el sensor SRF08 a una tasa ligeramente más alta de 65mS, deberá reducir la ganancia - consulte
la siguiente sección.
El alcance está fijado en el valor máximo cada vez que se pone en marcha el sensor SRF08. Si necesita
un alcance diferente, cámbielo al principio como parte del código de iniciación del sistema.
Ganancia analógica
En el registro de la ganancia analógica, se configura la ganancia máxima de las etapas analógicas.
Para configurar la ganancia máxima del srf08, simplemente deberá escribir uno de estos valores en el
registro de ganancia de la ubicación 1. Durante la medición, la ganancia analógica empieza con
su valor mínimo de 94. Este valor se incrementa en intervalos de aproximadamente 70uS hasta llegar al valor
de ganancia máxima, configurada en el registro 1. La ganancia máxima posible se alcanza después
de aproximadamente 390mm de alcance. La finalidad de poder limitar la ganancia máxima es permitirle iniciar
mediciones a una frecuencia mayor de 65mS. Dado que la medición puede ser muy corta, es posible iniciar una
nueva medición tan pronto como se hayan leído los datos de la medición previa. Un riesgo potencial
de esto es que la segunda medición podría captar un retorno de un eco distante del "ping"
anterior, dando un resultado falso referente a un objeto cercano cuando en realidad no hay ninguno. Para reducir esta
posibilidad, la ganancia máxima puede reducirse para limitar la sensibilidad de los módulos al echo
distante más débil, mientras que al mismo tiempo sigue siendo capaz de detectar la proximidad de objetos.
La configuración de la ganancia máxima se almacena sólo en la memoria RAM del CPU y se inicia
con el encendido del equipo, por lo que si sólo desea realizar las mediciones cada 65mS, o más, puede
ignorar los registros Range y Gain.
Nota - Es efectivo sólo en Modo de cálculo de distancia, en el Modo ANN, la ganancia se controla
automáticamente.
| Registro de ganancia |
Ganancia analógica máxima |
| Decimal |
Hexadecimal |
| 0 |
0X00 |
Fija la ganancia analógica máxima en 94 |
| 1 |
0X01 |
Fija la ganancia analógica máxima en 97 |
| 2 |
0X02 |
Fija la ganancia analógica máxima en 100 |
| 3 |
0X03 |
Fija la ganancia analógica máxima en 103 |
| 4 |
0X04 |
Fija la ganancia analógica máxima en 107 |
| 5 |
0X05 |
Fija la ganancia analógica máxima en 110 |
| 6 |
0X06 |
Fija la ganancia analógica máxima en 114 |
| 7 |
0X07 |
Fija la ganancia analógica máxima en 118 |
| 8 |
0X08 |
Fija la ganancia analógica máxima en 123 |
| 9 |
0X09 |
Fija la ganancia analógica máxima en 128 |
| 10 |
0X10 |
Fija la ganancia analógica máxima en 133 |
| 11 |
0X11 |
Fija la ganancia analógica máxima en 139 |
| 12 |
0X12 |
Fija la ganancia analógica máxima en 145 |
| 13 |
0X13 |
Fija la ganancia analógica máxima en 152 |
| 14 |
0X14 |
Fija la ganancia analógica máxima en 159 |
| 15 |
0X15 |
Fija la ganancia analógica máxima en 168 |
| 16 |
0X16 |
Fija la ganancia analógica máxima en 177 |
| 17 |
0X17 |
Fija la ganancia analógica máxima en 187 |
| 18 |
0X18 |
Fija la ganancia analógica máxima en 199 |
| 19 |
0X19 |
Fija la ganancia analógica máxima en 212 |
| 20 |
0X20 |
Fija la ganancia analógica máxima en 227 |
| 21 |
0X21 |
Fija la ganancia analógica máxima en 245 |
| 22 |
0X22 |
Fija la ganancia analógica máxima en 265 |
| 23 |
0X23 |
Fija la ganancia analógica máxima en 288 |
| 24 |
0X24 |
Fija la ganancia analógica máxima en 317 |
| 25 |
0X25 |
Fija la ganancia analógica máxima en 352 |
| 26 |
0X26 |
Fija la ganancia analógica máxima en 395 |
| 27 |
0X27 |
Fija la ganancia analógica máxima en 450 |
| 28 |
0X28 |
Fija la ganancia analógica máxima en 524 |
| 29 |
0X29 |
Fija la ganancia analógica máxima en 626 |
| 30 |
0X30 |
Fija la ganancia analógica máxima en 777 |
| 31 |
0X31 |
Fija la ganancia analógica máxima en 1025 |
Tenga en cuanta que la relación entre el registro de ganancia y la ganancia real no es una relación
lineal. No existe una fórmula mágica que diga "si utiliza este valor de ganancia, el alcance será
exactamente este". Depende del tamaño, forma, y material del objeto y de los elementos restantes de la
habitación. Lo recomendable es experimentar con diferentes valores hasta obtener los resultados deseados. Si
obtiene lecturas falsas, puede que sean los ecos de los "pings" anteriores, vuelva a lanzar el sensor SRF08
cada 65mS o más (menos tasa).
Si tiene alguna duda acerca de los registros Range y Gain, recuerde que en el sensor SRF08 se fijan los valores por
defecto automáticamente cuando se inicia el sistema. Es más, puede olvidarse de esta configuración
y utilizar los valores por defecto y el sensor funcionará correctamente, detectando objetos a 6 metros cada
65mS o menos.
Sensor de luz
El medidor ultrasónico SRF08 dispone de un sensor fotoeléctrico en la propia placa. Este medidor realiza
una lectura de la intensidad de la luz cada vez que se calcula la distancia en los modos Ranging o ANN (La conversión
analógica/digital se realiza realmente justo antes de que se lance el "ping" mientras el generador
de 10v +/- se encuentra en fase de estabilización). EL valor de la lectura va aumentando a medida que aumenta
la intensidad de la luz, por lo que valor máximo lo obtendrá con una luz brillante y el valor mínimo
en total oscuridad. La lectura debería acercarse a 2-3 en total oscuridad y aproximadamente a 248 (0xF8) en
luz diurna. La intensidad de la luz puede leerse en el registro del sensor de luz en la ubicación 1 al mismo
tiempo que puede leer los datos del alcance.
LED
EL indicador LED rojo se utiliza para indicar el código de la dirección I2C del sensor en el encendido
(ver abajo). Así mismo, también emite un breve destello durante el "ping" en el cálculo
de la distancia.
Cambio de la dirección del bus I2C del SRF08
Para modificar la dirección I2C del sensor SRF08 sólo podrá tener un sensor conectado al bus.
Escriba los 3 comandos de secuencias en el orden correcto seguidos de la dirección. Ejemplo; para cambiar la
dirección de un sensor que tiene actualmente la dirección 0xE0 (la dirección de fábrica
por defecto) a la dirección 0xF2, escriba lo siguiente en la dirección 0xE0; (0xA0, 0xAA, 0xA5, 0xF2).
Se deberían enviar estos comandos con el orden secuencial correcto para modificar la dirección I2C.
Además, no es posible emitir cualquier otro comando en medio de la secuencia. La secuencia debe enviarse al
registro de comandos de la ubicación 0, lo que implica que se escribirán 4 transacciones independientes
en el bus I2C. Una vez realizado todo esto, deberá etiquetar el sensor con su dirección. No obstante,
si olvida hacerlo, cuando lo encienda, no se enviará ningún comando. El sensor SRF08 indicará
su dirección mediante el LED. Un destello largo seguido de un número de destellos cortos indicará
la dirección. Los destellos terminarán inmediatamente después de enviar un comando al sensor
SRF08.
| Dirección |
|
| Decimal |
Hexadecimal |
Destello Largo |
Destellos cortos |
| 224 |
E0 |
1 |
0 |
| 226 |
E2 |
1 |
1 |
| 228 |
E4 |
1 |
2 |
| 230 |
E6 |
1 |
3 |
| 232 |
E8 |
1 |
4 |
| 234 |
EA |
1 |
5 |
| 236 |
EC |
1 |
6 |
| 238 |
EE |
1 |
7 |
| 240 |
F0 |
1 |
8 |
| 242 |
F2 |
1 |
9 |
| 244 |
F4 |
1 |
10 |
| 246 |
F6 |
1 |
11 |
| 248 |
F8 |
1 |
12 |
| 250 |
FA |
1 |
13 |
| 252 |
FC |
1 |
14 |
| 254 |
FE |
1 |
15 |
Asegúrese de no configurar más de un sensor con la misma dirección, ya que se produciría
una colisión en el bus, con resultados totalmente imprevisibles.
Consumo de corriente
El consumo medio de corriente se calcula que es aproximadamente 12mA durante el cálculo de la distancia, y
3mA en modo de espera. El módulo entrará automáticamente en modo de espera después de
terminar la medición, mientras espera al siguiente comando del bus I2C. El perfil real de consumo de corriente
del srf08 es el siguiente:
| Tipo de operación realizada |
Corriente |
Duración |
| Comando de medición de la distancia recibido -Encendido |
275mA |
3uS |
| Estabilización del generador de +/- 10v |
25mA |
600uS |
| 8 ciclos de "ping" 40kHz |
40mA |
200uS |
| Medición |
1mA |
65mS máx. |
| Modo de espera (Stand-by) |
3mA |
Indefinido |
Los valores de la tabla anterior se ofrecen sólo a modo orientativos, no se han comprobado en unidades de
producción.
Cambio del ángulo de detección
El ángulo de detección no se puede cambiar. Esta es una pregunta que se hace muy frecuentemente y cuya
respuesta es que no se puede alterar. El foco de trabajo del SRF08 es un cono cuyo ancho depende del propio traductor
y esta es fija. La forma del área de trabajo del traductor ultrasónico empleado en el SRF08 es la de
la siguiente figura, tomada de la hoja de características del fabricante.
Programas de Ejemplo
Consulte también el esquemas del srf08 y los ejemplos
de conexión: Basic Stamp y SRF08 y el de BasicX-24 y SRF08.

Haga clic en el botón COMPRAR para añadir este producto a su carrito de la compra.
44,75-Euros.
IVA incluido
|
SRF08 SENSOR DISTANCIAS POR ULTRASONIDOS I2C SRF08
Vea mas productos de esta categoría en:
Sensores y detectores para robótica.
Ir a la Página Principal de www.SuperRobotica.com
Actualizada el 09/01/2026 © 2002 -2026 INTPLUS ®. Todos los derechos reservados
|