|

Presentación del Sensor SRF235
SRF235 es un medidor de distancias por ultrasonidos de alta frecuencia y haz estrecho con conexión I2C
de múltiples aplicaciones dentro de la robótica. Este sensor de ultrasonidos destaca por utilizar un sensor ultrasónico
industrial que funciona a una frecuencia de 235Khz y tiene un haz de solo 15 grados, lo que proporciona una medida
de altísima precisión y gran direccionabilidad. Debido a su alta frecuencia, puede efectuar hasta 100 mediciones
por segundo, siendo toda la memorización totalmente interna liberando al microcontrolador de retardos y tiempos
de espera. Gracias a su bus I2C se pueden conectar hasta 16 unidades con solo dos líneas de entrada y salida,
permitiendo montar un completo sonar perimetral en cualquier robot con solo dos pines libres. Este sensor se puede
utilizar a la vez que otros sensores de 40 Khz como el srf8 ya que no se hacen interferencias entre si.
El sensor de distancias por ultrasonidos SRF235 dispone de un transductor industrial de alta frecuencia que opera
a 235KHz utilizado para transmitir y recibir. El patrón del haz de detección que se muestra a continuación
compara los 15 del Sensor SRF235 con los 55 del patrón común de SRF04.
 |
 |
| Patrón de haz de detección de SRF235 |
Patrón de haz de detección de SRF04 |
Limitaciones y Características
El ultrasonido a 235KHz no se transmite tan fácilmente a través del aire como el ultrasonido a 40KHz,
por lo que el alcance del SRF235 está limitado a aproximadamente 1 metro para objetos normales y a un máximo
de 1,2 para superficies extensas. El uso de un solo transductor para transmitir y recibir implica que hay una zona
de ángulo muerto de 10cm, por lo que el alcance efectivo es de 10cm a 1,2m. El haz estrecho de 15° a
235KHz se comporta más como una luz en un espejo que como sensores a 40KHz, por lo que al mirar a una superficie
llana dura en un ángulo de más de 8° o 9° no
generará un eco procedente de dicha superficie. Puede ocurrir que el haz alcanza a un objeto y rebota. En
este caso se detectará el eco procedente del objeto y el sonar indicará la distancia total del sonar
en una superficie llana + la superficie llana con respecto el objeto. La propia superficie llana será invisible
para el sonar. En las mismas circunstancias, un sensor de 40KHz como el SRF04 detectaría la superficie plana-
no el objeto reflejado.
 |
 |
 |
| En un ángulo de sólo 9 grados, el haz del sensor no se vuelve a reflejar en el sonar |
A continuación hay un objeto en el trayecto del haz reflejado. El haz rebotará en el objeto
y - |
volverá a través de la superficie llana al sonar, que pensará que existe un objeto en
la distancia delante de él. |
Partes del mobiliario blandos no se reflejan bien a 235KHz por lo que es posible que no se detecten correctamente.
Tenga en cuenta estas características antes de adquirir un sensor de distancia por ultrasonidos SRF235.
El sensor SRF235 detecta a la perfección objetos redondos duros, como por ejemplo patas de mesas o sillas.
De modo que resulta ideal SRF235 para trazar recorridos locales para el robot, pero no tanto para detectar distancias.
Un sensor SRF235 utilizado junto a un sonar de 40KHz crea un a combinación de detección de gran eficacia.
Comunicación
La comunicación con sensor de distancias por ultrasonidos SRF235 se realiza a través del bus I2C,
que está disponible en la mayoría de los controladores del mercado como OOPic, Stamp BS2p, PicAxe
etc. además de una gran variedad de microcontroladores. Con respecto al programador el SRF235 se comporta
de la misma manera que la serie 24xx de la famoso EEPROM, excepto en que la dirección I2C es diferente.
La dirección predeterminada de fábrica del SRF235 es 0xE0. El usuario puede modificarlo a cualquiera
de las 16 direcciones siguientes: E0, E2, E4, E6, E8, EA, EC, EE, F0, F2, F4, F6, F8, FA, FC o FE, por lo que se
puede utilizar hasta 16 sonares simultaneamente en mismo bus I2C.
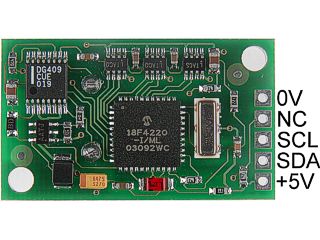
Conexiones
Las conexiones con el SRF235 son idénticas a las de los sensores SRF08 y SRF10. El pin marcado con el mensaje "NC" se
debería dejar sin conexión. En realidad se trata de la línea MCLR de la
CPU que se utiliza unicamente para programar el PIC18F44220 en la propia placa después
del montaje, y tiene una resistencia de polarización positiva interna. Las líneas SCL y SDA
deberían
también disponer de una resistencia de polarización a +5v en algún punto del bus
I2C. Lo único
que necesitará es
un par de resistencias en todo el bus I2C, y no un par para cada módulo. Normalmente están ubicadas
en el propio circuito maestro del bus, en vez de en los esclavos. El SRF235 actua siempre como un esclavo, nunca
como maestro dentro del bus I2C. Si las necesitase, le recomendamos resistencias de polarizacion 1K8. Algunos
módulos
como los OOPic ya disponen de resistencias en el propio circuito or lo que no necesitará instalarlas.
Registros
El SRF235 tiene un conjunto de 4 registros.
| Ubicación |
Lectura |
Escritura |
| 0 |
Revisión de Software |
Registro de comando |
| 1 |
Sin uso (lee 0x80) |
N/A |
| 2 |
Alcance Byte alto |
N/A |
| 3 |
Alcance Byte bajo |
N/A |
Se puede escribir solamente en el registro 0. Este es el registro
de comando y se utiliza para iniciar el proceso de medición. No se puede leer.
La lectura desde la ubicación
0 devuelve el valor de la revisión del software de SRF235. El cálculo de la distancia tarda
10mS, y el SRF235 no responderá a comandos en el bus I2C mientras que está calculando la distancia.
Las ubicaciones 2 y 3, son el resultado sin signo de los 16 bits de la última medición - el byte
alto en primer lugar. El significado de este valor depende del comando utilizado, ya que puede ser la distancia
en pulgadas, en cm, o el tiempo de vuelo en uS. Un valor de 0 indica que no se han detectado objetos. Se puede
iniciar una nueva medición
tan pronto como haya leído el último valor. Nno se necesitan retardos.
Comandos
Existen tres comandos para iniciar una medición (80 a 82), para obtener el resultado en pulgadas, centímetros
o microsegundos respectivamante. Asimismo también existe un conjunto de comandos para cambiar la dirección
I2C.
Comando |
Acción |
| Decimal |
Hexadecimal |
| 80 |
0x50 |
Modo de medición - Resultado en pulgadas |
| 81 |
0x51 |
Modo de medición - Resultado en centímetros |
| 82 |
0x52 |
Modo de medición - Resultado en microsegundos |
| |
|
|
| 160 |
0xA0 |
1º en la secuencia para cambiar la dirección I2C |
| 165 |
0xA5 |
3º en la secuencia para cambiar la dirección I2C |
| 170 |
0xAA |
2º en la secuencia para cambiar la dirección I2C |
Medición
Para iniciar una medición de la distancia, deberá escribir uno de los comandos anteriores en el
registro de comandos y esperar el tiempo necesario para completar el proceso y leer el resultado. El búfer
del eco se borrará al inicio de cada medición. La medición de distancia tarda en completarse
unos 10mS, a continuación se puede leer estos resultados de las ubicaciones 2 y 3.
Comprobación de la medición
No tiene que utilizar un temporizador en su propio controlador para esperar que una medición termine. Puede
aprovecharse del hecho de que el SRF235 no responderá a ninguna actividad de I2C mientras esté realizando
la medición. Por lo tanto, si intenta leer desde el SRF235 (utilizamos el número de revisión
de software en la ubicación 0) entonces obtendrá 255 (0xFF) mientras se realiza la medición.
Esto se debe a que el nivel lógico de la línea de datos I2C (SDA) se eleva si no hay nada que la
active. Tan pronto como finalice la medición. el SRF235 volverá a responder al bus I2C, por lo que
deberá seguir leyendo el registro hasta que no aparezca más 255 (0xFF). Puede entonces leer los datos
del sonar. Su controlador puede aprovecharse de ello para realizar otras tareas mientras que el SRF235 está realizando
la medición.
LED
El LED rojo se utiliza para mostrar el código de la dirección I2C durante el arranque (vea a continuación).
También parpadea brevemente durante el "ping" en la medición.
Cambio de la dirección I2C del Bus
Para cambiar la dirección I2C de SRF235 debe tener sólo un sonar en el bus. Escriba las 3 secuencias
de comandos en el orden correcto seguido de la dirección. Por ejemplo, para cambiar la dirección
de un sonar actualmente en la dirección 0xE0 (dirección predeterminada de fábrica) a 0xF2,
escriba lo siguiente para la dirección 0xE0; (0xA0, 0xAA, 0xA5, 0xf2 ). Estos comandos deben enviarse en
la secuencia correcta para cambiar la dirección I2C, además, no se puede enviar otro comando en medio
de la secuencia. La secuencia debe enviarse al registro de comandos en la ubicación 0, lo que significa
que se crearán 4 transacciones de escritura en el bus I2C. Cuando termine debería apuntar la dirección
del sonar. Aunque si se le olvida, simplemente debería encenderlo sin enviar ningún comando. El SRF235
mostrará parpadeando su dirección en el LED. Un destello largo seguido de un número de destellos
cortos indica su dirección. Los destellos finalizarán inmediatamente después de enviar un
comando al SRF235.
Dirección |
Destello largo |
Destellos cortos |
Decimal |
Hexadecimal |
224 |
E0 |
1 |
0 |
226 |
E2 |
1 |
1 |
228 |
E4 |
1 |
2 |
230 |
E6 |
1 |
3 |
232 |
E8 |
1 |
4 |
234 |
EA |
1 |
5 |
236 |
EC |
1 |
6 |
238 |
EE |
1 |
7 |
240 |
F0 |
1 |
8 |
242 |
F2 |
1 |
9 |
244 |
F4 |
1 |
10 |
246 |
F6 |
1 |
11 |
248 |
F8 |
1 |
12 |
250 |
FA |
1 |
13 |
252 |
FC |
1 |
14 |
254 |
FE |
1 |
15 |
Asegúrese de no configurar más de un sonar en la misma dirección, ya que se podría
ocasionar un colapso del bus y resultados impredecibles.

Haga clic en el botón COMPRAR para añadir este producto a su carrito de la compra.
133,15-Euros.
IVA incluido
|
SRF235 SENSOR ULTRASONIDOS ALTA FRECUENCIA
Vea mas productos de esta categoría en:
Sensores y detectores para robótica.
Ir a la Página Principal de www.SuperRobotica.com
Actualizada el 09/01/2026 © 2002 -2026 INTPLUS ®. Todos los derechos reservados
|