|
TPA81 es un sensor térmico de 8 píxeles capaz de medir la temperatura de un objeto a distancia. Este sensor
esta formado en realidad por una matriz de 8 sensores colocados linealmente de forma que puede medir 8 puntos adyacentes
simultáneamente. A diferencia de los sensores pir utilizados en sistemas de alarmas y detectores para encender
luces, el sensor térmico no necesita que haya movimiento para detectar el calor, por lo que su aplicación
en el campo de la robótica, abre gran cantidad de aplicaciones no disponibles hasta ahora. El sensor se conecta
por bus I2C y además se le puede conectar un servo estándar que es controlado por el propio sensor
para hacer un barrido y tomar 32 mediciones diferentes, obteniéndose un mapa térmico de 180 grados.
El TPA81 es capaz de detectar la llama de una vela a 2 metros de distancia y además no le afecta la luz ambiental.
Introducción
El sensor de temperatura TPA81 es un módulo térmico de detección por infrarrojos en un rango
de 2µm a 22µm que es la longitud de onda del calor radiante. Los sensores pir que se utilizan generalmente
en las alarmas antirrobo y para el encendido/apagado de las luces exteriores, detectan señales infrarrojas
en la misma banda de onda, sin embargo estos sensores sólo detectan cambios en la temperatura, no la temperatura
en si. Aunque son útiles en robótica, sus aplicaciones son limitadas, ya que no pueden detectar y
medir la temperatura de una fuente de calor estática. El otro tipo de sensor es el sensor termopila, que
se utilizan en los termómetros por infrarrojos sin contacto. Tienen un ángulo de detección
o campo de visión (FOV) muy amplio, de aproximadamente 100° y requieren una carcasa con una lente para
obtener un campo de visión reducido de aproximadamente 12°. Actualmente es difícil encontrar
sensores con módulo de termopilas, electrónica y lente de silicona integrada con el caso del TPA81.
Este sensor tiene en realidad una formación de ocho termopilas organizadas en una hilera. El Sensor de temperatura
TPA81 puede medir la temperatura de 8 puntos adyacentes de manera simultánea. El TPA81 también puede
controlar un servo para manejar el módulo y generar una imagen térmica.
Respuesta de espectro
La repuesta TPA81 es normalmente de 2µm a 22µm como se muestra a continuación:
Campo de visión (FOV)
El campo de visión normal de TPA81 es de 41° por 6° convirtiendo cada uno de los ocho
píxels en 5.12° por 6°. El conjunto de ocho píxels está orientado a lo largo de la
placa de circuito impreso (PCB) - como indica el siguiente diagrama de arriba a abajo. El número de píxel
es el más cercano a la pestaña del sensor - o en la parte inferior del diagrama siguiente.
Sensibilidad
Estos son algunos de los números resultantes de uno de nuestros módulos de prueba:
para una vela, los números para cada uno de los ocho píxels a una distancia de 1 metro en una habitación
fresca a 12° son los siguientes:
11 10 11 12 12 29 15 13 (Todos en grados centígrados)
Puede ver que la vela de muestra aparece como la lectura de 29°C. A una distancia de 2 metros, ésta
se reduce a 20°C, aproximadamente unos 8°C por encima de la temperatura ambiente, por lo que todavía es
fácilmente detectable. A 0,6 metros da aproximadamente 64°C. A 0,3 metros da aproximadamente 100°C.
En una habitación más cálida a 18°C, la llama mide 27°C a 2 metros de distancia.
Esto se debe a que la vela sólo ocupa una pequeña parte del campo de visión y la fuente de
calor de la vela se suma a la temperatura ambiente del aire no la superpone por completo. Un cuerpo humano a 2
metros aparecerá como 29°C, con una temperatura ambiente de 20° C.
A continuación adjuntamos una imagen de nuestro programa de prueba. Muestra una imagen de mapa de bits
de 32x8 píxeles producida utilizando un servo para mover el sensor. Si desea una copia de este programa basado
en Windows, puede descargársela de aquí,
pero necesitará un RF04 transceptor de datos USB y un CM02
transceptor de datos I2C para conectar el sensor de temperatura TPA81 al PC. Aquí puede ver una llama
de una vela a una distancia de un metro que aparece en un lugar iluminado.
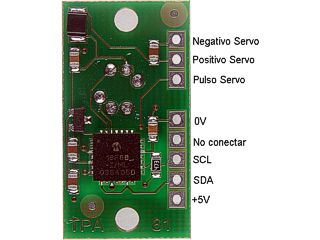
Conexiones
Toda la comunicación con el sensor térmico TPA81 se realiza a través del bus I2C. Si no está familiarizado
con el bus I2C, podrá encontrar un tutorial aquí que
le servirá de ayuda. El sensor TPA81 utiliza una conexión I2C de 5 pines. El pin marcado con el mensaje "No
conectar" se debería dejar sin conexión. En realidad se trata de la línea MCLR de la
CPU y se utiliza solamente para programar el PIC16F88 en la propia placa después del montaje, tiene una
resistencia de polarización positiva interna. Las líneas SCL y SDA deberían disponer las dos
de una resistencia de polarización a +5v en algún punto del bus I2C. Lo único que necesitará es
un par de resistencias en todo el bus, y no un par para cada módulo. Normalmente están ubicadas en
el circuito del bus maestro. El sensor térmico TPA81 actúa siempre como un modulo esclavo dentro del bus I2C. Si
necesita utilizar resistencias de polarización, le recomendamos resistencias de 1K8. Algunos módulos
como los OOPic ya disponen de resistencias de polarización por lo que no necesitará conectar unas
nuevas. El TPA81 incluye un conector para un servo estándar que se alimenta desde los 5v de la alimentación del
modulo. Se pueden enviar comandos de posicionamiento al TPA81 para colocar el servo en cualquiera de las 32 posiciones
disponibles, los pulsos de control del servo los genera el propio módulo TPA81.
Registros
El TPA81 aparece como un conjunto de 10 registros.
| Registro |
Lectura |
Escritura |
| 0 |
Revisión de Software |
Registro de comando |
| 1 |
Temperatura ambiente °C |
Utilizado para la calibración- no escribir |
2 |
Temperatura Píxel 1 °C |
Utilizado para la calibración- no escribir |
3 |
Píxel 2 |
Utilizado para la calibración- no escribir |
4 |
Píxel 3 |
N/A |
5 |
Píxel 4 |
N/A |
6 |
Píxel 5 |
N/A |
7 |
Píxel 6 |
N/A |
8 |
Píxel 7 |
N/A |
| 9 |
Píxel 8 |
N/A |
Sólo se pueden escribir los registros 0, 1, 2 y 3. El Registro 0 se trata de un comando de registro y se
utiliza para colocar la posición del servo y cambiar la dirección I2C de TPA81. No se puede leer.
La lectura del registro 0 devuelve la revisión de software de TPA81. los Registros 1, 2 y 3, se utilizan
para calibrar el sensor. No escriba en estos registros ya que se pueden eliminar los datos de calibración
de los sensores. (Existe protección para ello. Debe proporcionarse una secuencia de comandos específica
de 3 bytes similar a la secuencia de cambio de dirección I2C para habilitar el modo de calibración).
La calibración requiere el uso de dos fuentes de calor de cuerpos negros. Sólo podrá calibrar
el módulo si dispone de estos cuerpos. Todos los módulos están calibrados en nuestro taller,
como parte de nuestros proceso de prueba.
Hay 9 lecturas de temperatura disponibles, todas expresadas en grados centígrados (C). El registro 1 se
trata de la temperatura medida por el sensor. Los registros 2-9 son las temperaturas de 8 píxels. La adquisición
de temperatura se realiza de manera continua y las lecturas serán correctas 40mS después de que el
sensor apunte a una nueva posición.
Posición de Servo
Los comandos 0 a 31 establecen la posición del servo. Hay 32 pasos (0-31) que representan los 180 grados
de rotación en un servo Hitec HS311. El cálculo es SERVO_POS*60+540uS. Por lo que el alcance del
pulso del servo es de 0.54mS a 2.4mS en pasos de 60uS. Si se escribe cualquier otro valor al registro del comando
se detendrán los pulsos del servo.
Comando |
Acción |
Decimal |
Hexadecimal |
0 |
0x00 |
Establece la posición del servo al mínimo |
nn |
nn |
Establece la posición del servo |
31 |
0x1F |
Establece la posición del servo al máximo |
|
|
|
160 |
0xA0 |
1º en la secuencia para cambiar la dirección I2C |
165 |
0xA5 |
3º en la secuencia para cambiar la dirección I2C |
170 |
0xAA |
2º en la secuencia para cambiar la dirección I2C |
Cambio de la dirección I2C del Bus
Para cambiar la dirección I2C de TPA81 debe tener sólo un módulo en el bus. Escriba las 3
secuencias de comandos en el orden correcto seguido de la dirección. Por ejemplo, para cambiar la dirección
de un TPA81 actualmente en la dirección 0xD0 (dirección predeterminada de fábrica) a 0xD2,
escriba lo siguiente para la dirección 0xD0; (0xA0, 0xAA, 0xA5, 0xD2 ). Estos comandos deben enviarse en
la secuencia correcta para cambiar la dirección I2C, además, no se puede enviar otro comando en medio
de la secuencia. La secuencia debe enviarse al registro de comandos en la ubicación 0, lo que significa
que se crearán 4 transacciones de escritura en el bus I2C. Además, DEBE haber un retardo de al menos
50mS entre la escritura de cada byte de la secuencia de los cambios de dirección. Cuando lo haya realizado,
debería etiquetar el sensor con sus direcciones, si pierde las direcciones del módulo, la única
manera de averiguarlas es buscar todas las direcciones una a una hasta averiguar cuál es la que responde.
TPA81 puede tener hasta ocho direcciones I2C- 0xD0, 0xD2, 0xD4, 0xD6, 0xD8, 0xDA, 0xDC, 0xDE. La dirección
predeterminada de fábrica es 0xD0.

Haga clic en el botón COMPRAR para añadir este producto a su carrito de la compra.
81,25-Euros.
IVA incluido
|
SENSOR TERMICO DE 8 PIXELES CON BARRIDO TPA81
Vea mas productos de esta categoría en:
Sensores y detectores para robótica.
Ir a la Página Principal de www.SuperRobotica.com
Actualizada el 09/01/2026 © 2002 -2026 INTPLUS ®. Todos los derechos reservados
|