|
MD25 es un circuito de tipo puente en H capaz de controlar dos motores de corriente continua de hasta 2,8 amperios y 12V. El circuito se controla externamente
mediante un bus serie o mediante bus I2C lo que permite su comunicación con cualquier microcontrolador moderno, incluyendo BasicX, Pic, Atmel y
un largo etc. El circuito cuenta con numerosos registros que controlar la aceleración, la velocidad, la corriente de cada motor y los contadores
de los encoders de cada motor. También, cuenta con su propio regulador de tensión que proporciona hasta 300 ma para alimentar un circuito
externo, por lo que solo es necesario la alimentación de 12V tanto para la electrónica como para los motores. Cuenta con varios modos de
trabajo incluyendo uno independiente con o sin control de velocidad y otro modo diferencial que facilita el trabajo a la hora de controlar un robot con
comandos de velocidad y dirección. Este circuito cuenta con entradas para codificadores de motores que devuelven un tren de impulsos conforme gira
el eje del motor. Esto permite al circuito aplicar mayor o menor potencia a los motores para conseguir que alcance la velocidad real establecida en el
registro correspondiente. De esta forma se consigue que la velocidad sea siempre la misma independientemente de la carga o la resistencia que encuentre
el motor. Los contadores de impulsos, también puede leerse externamente para determinar la distancia real recorrida, los giros etc. Se recomienda
su utilización con los motores EMG30 S330100.
Descripción General
El MD25 se trata de un potente circuito controlador dual de motor a través de bus serie e I2C, diseñado para su uso con nuestro motor EMG30
(Motor DC reductor 12 voltios 170 RPM con codificador EMG30 - S330100). Las características más destacadas del
producto son:
1. Lee los codificadores de cuadrante de los motores y proporciona recuentos en los registros para determinar la distancia cubierta
y la dirección.
2. Puede controlar dos motores de forma independiente o conjunta.
3. La corriente del motor puede leerse a través de los registros.
4. La alimentación del módulos es única de 12v.
5. El regulador de 5 v en placa puede proporcionar hasta 1A de pico o 300mA de forma continua para los circuitos externos
6. Su función de control de dirección puede controlarse a mediante un simple comando.
7. Permite la regulación de la aceleración, así como de la potencia.
Tensión de Motor
El MD25 está diseñado para trabajar en un rango de tensión entre los 9 y los 14 V por lo que puede emplearse una gran numero de baterías y
fuentes de alimentación. Una tensión por debajo de los 9V prácticamente garantizan que los motores no se moverán.
Supresión del ruido de motor
Al utilizar los motores EMG30 con codificador, podrá comprobar que se ha añadido un condensador de supresión de ruido de 10n. Los demás
motores requieren supresión. Para agregar la supresión, basta con agregar un condensador de supresión de 10n en los motores. El condensador
debería ser capaz de manejar una tensión dos veces superior a la tensión del motor.
Indicadores luminosos
El led de alimentación de color rojo indica que se ha aplicado la alimentación al módulo.
Un led de color verde parpadea para indicar mediante destellos la dirección I2C y después se ilumina durante 500mS para indicar que la actividad
del bus I2C es correcta en el módulo. El temporizador interno de 500mS se pone a cero cada vez que se hay actividad en el bus I2C, por lo que estará activo
durante un acceso continuo.
Conexiones
En la imagen siguiente puede verse las diferentes conexiones del circuito MD25.
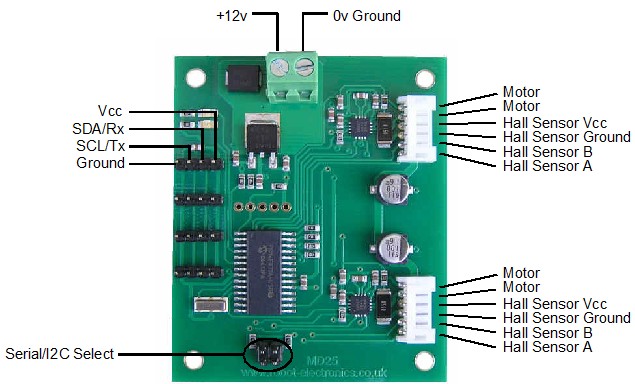
Modos de funcionamiento
El MD tiene varios modos de funcionamiento que se seleccionan mediante dos jumpers. La principal diferencia esta entre el modo I2C y el modo serie, en
el que a su vez se puede escoger entre tres velocidades de comunicación posibles.
| Jumper1 |
Jumper2 |
Modo |
| Off |
Off |
Modo I2C (hasta 100 Khz de velocidad de reloj. |
| Off |
On |
Modo Serie 9600 Baudios |
| On |
Off |
Modo Serie 19200 Baudios |
| On |
On |
Modo Serie 38400 Baudios |
Ver el esquema de dimensiones al final de la página para localizar los Jumper 1 y 2. Off es con el jumper quitado. On es con el jumper colocado
entre los dos postes de forma vertical .
MD25 EN MODO I2C
Regulación automática de velocidad
El controlador MD25 puede aumentar de forma dinámica la potencia recibiendo la información de los codificadores según sea necesario.
Si no se lograse la velocidad requerida, el controlador MD25 aumentará la potencia de los motores hasta alcanzar la velocidad deseada o hasta que
se alcance la salida máxima. La regulación de velocidad puede desactivarse a través del registro de comandos.
Parada automática del motor
El controlador MD25 detendrá automáticamente los motores si no hay comunicaciones I2C en 2 segundos. Esta función sirve para evitar
que su robot pierda el control en caso de que el controlador falle. Esta función puede desactivarse, si se desea. Consulte Registro de comandos.
Control de MD25
El controlador MD25 está diseñado para operar en un sistema de bus I2C estándar en las direcciones entre 0xB0 y 0xBE (el último
bit de la dirección es un bit de lectura/escritura, por lo que sólo pueden ser números pares), siendo 0xB0 la dirección por defecto.
Se puede modificar con facilidad por software. Consulte la sección Cambio de la dirección del bus I2C.
El modo I2C permite al controlador MD25 conectarse a la mayoría de los controladores de mercado tales como PICAXE, BasicX24 y BS2P, y una amplia gama
de microcontroladores como PIC, AVR, 8051, etc.
El protocolo de comunicación I2C con el módulo MD25 es el mismo que el que utiliza EPROM, es decir el 24C04. Para leer uno o más registros
de MD25, primero se envía el bit de inicio, la dirección del módulo (0XB0 por ejemplo) con el bit de nivel lógico bajo de lectura/escritura,
y después el número de registros que desea leer. Esto va seguido de un inicio repetido, y de nuevo por la dirección del módulo
con el bit lógico alto de lectura/escritura (0XB1 en este ejemplo). Ahora ya puede leer uno o más registros. El controlador MD25 tiene 17 registros
numerados del 0 al 16 de la manera siguiente:
| Registro |
Nombre |
Lectura/Escritura |
Descripción |
| 0 |
Velocidad1 |
R/W (Lectura/Escritura) |
Velocidad de Motor1 (modo 0,1) o velocidad (modo 2,3) |
| 1 |
Velocidad2/Giro |
R/W (Lectura/Escritura) |
Velocidad de Motor2 (modo 0,1) o velocidad (modo 2,3) |
| 2 |
Codificador1a |
Sólo lectura |
La posición del Codificador 1, el 1º byte (nivel lógico más alto) y recuento de la captura durante la lectura |
| 3 |
Codificador1b |
Sólo lectura |
Posición del Codificador 1, 2º byte |
| 4 |
Codificador1c |
Sólo lectura |
Posición del Codificador 1, 3º byte |
| 5 |
Codificador1d |
Sólo lectura |
Posición del Codificador 1, 3º byte |
| 6 |
Codificador2a |
Sólo lectura |
La posición del Codificador 2, el 1º byte (nivel lógico más alto) y recuento de la captura durante la lectura |
| 7 |
Codificador2b |
Sólo lectura |
Posición del Codificador 2, 2º byte |
| 8 |
Codificador2c |
Sólo lectura |
Posición del Codificador 2, 3º byte |
| 9 |
Codificador2d |
Sólo lectura |
Posición 2 del Codificador 4º byte (byte de nivel lógico más bajo) |
| 10 |
Voltios de la batería |
Sólo lectura |
Tensión de alimentación |
| 11 |
Corriente del Motor 1 |
Sólo lectura |
La corriente del motor 1 |
| 12 |
Corriente del Motor 2 |
Sólo lectura |
La corriente del motor 2 |
| 13 |
Revisión de software |
Sólo lectura |
Número de revisión de software |
| 14 |
Tasa de aceleración |
R/W (Lectura/Escritura) |
Registro opcional de aceleración |
| 15 |
Modo |
R/W (Lectura/Escritura) |
Modo de operación (vea a continuación) |
| 16 |
Comando |
R/W (Lectura/Escritura) |
Utilizado para poner a cero los recuentos del codificador y cambiar la dirección del módulo |
Registro de Velocidad1
Dependiendo del modo en el que esté trabajando, este registro puede afectar a la velocidad de uno de los motores o de ambos. El modo 0 ó 1
sirve para establecer la velocidad y la dirección del motor 1. Cuanto más grande sea el número escrito en este registro, mayor será la
potencia aplicada al motor. El 2 ó 3 sirve para controlar la velocidad y dirección de ambos motores (puede afectar al registro de giro).
Registro de Velocidad2/Giro
El modo 0 ó 1 sirve para definir la velocidad y dirección del motor 2. En el modo 2 ó 3, la Velocidad2 se convierte en el registro de
Giro, y cualquier valor en este registro se combinará con los contenidos de Velocidad1 para controlar la dirección del dispositivo (vea a continuación).
Modo de Giro
El modo de Giro comprueba el registro de velocidad para decidir si la dirección es hacia adelante o hacia atrás. Entonces suma o resta el valor
de giro en cualquiera de los dos motores.
Por lo tanto, si la dirección es hacia adelante
la velocidad1 del motor = velocidad - giro
velocidad2 del motor = velocidad + giro
mientras que si la dirección es hacia atrás la
velocidad1 del motor = velocidad + giro
velocidad2 del motor = velocidad - giro
Si alguno de los motores no pudiera alcanzar la velocidad requerida para el giro (más allá de la salida máxima), entonces el programa
cambiará automáticamente el otro motor para que compense la diferencia necesaria.
Registros de codificador
Cada motor dispone de un recuento del codificador almacenado en matrices de 4 bytes, en forma de un número con signo de 32 bits, el recuento del codificador
se captura en una lectura del byte de nivel lógico más alto (registros 2, 6) y los siguientes bytes de nivel lógico más bajo
se retendrán hasta que se alcance la lectura del byte de nivel lógico más alto. El recuento se almacena con el byte más alto
en el byte mas bajo del correspondiente registro. Los registros pueden ponerse a cero en cualquier momento escribiendo 32 (0x20) en el Registro de comandos.
Tensión de la batería
En este registro se puede obtener una lectura de la tensión de la batería conectada. La lectura es 10 veces la tensión (121 para 12.1v).
Corriente del Motor 1 y 2
En este registro puede obtener el promedio de corriente a través del motor. La lectura es aproximadamente 10 veces el número de amperios (25
para 2.5A).
Número de revisión de Software
Este registro contiene el número de revisión del software en los módulos del controlador PIC16F873 - actualmente 1 en el momento de
la escritura.
Tasa de aceleración
Si necesita una tasa de aceleración controlada para que los motores conectados alcancen la velocidad máxima deseada, puede utilizar el registro
correspondiente del controlador MD25. Funciona utilizando un valor en el registro de aceleración e incrementando la potencia por dicho valor. Cambio
de la velocidad actual de los motores y la nueva velocidad (en los registros la velocidad 1 y 2). Si los motores trabajan a toda velocidad hacia adelante
(255) y se les da la orden de moverse a toda velocidad en dirección inversa (0), entonces habría pasos de 255 con un registro de aceleración
con un valor 1, y pasos de 128 para un valor 2. El valor por defecto de aceleración es 5, lo que significa que la velocidad se cambiará de
dirección hacia adelante a dirección hacia atrás en tan sólo 1,25 segundos. El registro aceptará valores desde 1 hasta
el 10 que equivale a un periodo de tan sólo 0,65 segundos para poder cambiar el sentido de la marcha a toda velocidad.
Utilice la siguiente fórmula para calcular el tiempo (segundos) para alcanzar la aceleración:
si la velocidad nueva es > velocidad actual
pasos = (nueva velocidad - velocidad actual) / registro de aceleración
si la velocidad nueva es < velocidad actual
pasos = (velocidad actual - nueva velocidad) / registro de aceleración
tiempot = pasos * 25ms
Por ejemplo::
| Registro de aceleración |
Tiempo/Paso |
Velocidad actual |
Nueva velocidad |
Pasos |
Tiempo de aceleración |
| 1 |
25 ms |
0 |
255 |
255 |
6.375 |
| 2 |
25 ms |
127 |
255 |
64 |
1,6 seg |
| 3 |
25 ms |
80 |
0 |
27 |
0,675 seg |
| 5 (por defecto) |
25 ms |
0 |
255 |
51 |
1,275 seg |
| 10 |
25 ms |
255 |
0 |
26 |
0,65 seg |
Registro de modo
El registro de modo selecciona el modo de operación y el tipo de entrada de datos I2C que requiere el usuario. Las opciones son:
0, (Valor por defecto) Si se escribe un valor 0 en el registro de modo, entonces el significado de la velocidad será una velocidad literal
en el rango de 0 (Marcha atrás) 128 (Parada) 255 (Marcha hacia delante).
1, El Modo 1 es similar al Modo 0, salvo en que los registros de velocidad se interpretan como valores con signo. El significado de los registros
de velocidad es la velocidad literal en el rango -128 (Marcha hacia delante) 0 (Parada) 127 (Marcha hacia delante).
2, Si se escribe un valor 2 en el registro de modo, la velocidad1 controlará la velocidad de ambos motores, y velocidad2 se convierte
en la velocidad de giro.
Los datos están en el rango entre 0 (Marcha hacia atrás) 128 (Parada) 255 (Marcha hacia delante).
3, El Modo 3 es similar al Modo 2, salvo en que los registros de velocidad se interpretan como valores con signo.
Los datos están en el rango entre -128 (Marcha hacia atrás) 0 (Parada) 127 (Marcha hacia adelante)
Registro de comandos
| Comando |
Acción |
| Dec |
Hex |
| 32 |
20 |
Pone a cero los registros del codificador |
| 48 |
30 |
Desactiva la regulación automática de velocidad |
| 49 |
31 |
Activa la regulación automática de velocidad (por defecto) |
| 50 |
32 |
Desactiva el tiempo de inactividad de 2 segundos de los motores (a partir de la Versión 2) |
| 51 |
33 |
Activa el tiempo de inactividad de 2 segundos de los motores (por defecto) cuando no hay comunicaciones por el bus I2c (a partir de la Versión
2) |
| 160 |
A0 |
1º en la secuencia para modificar la dirección I2C |
| 170 |
AA |
2º en la secuencia para modificar la dirección I2C |
| 165 |
A5 |
3º en la secuencia para modificar la dirección I2C |
Cambio de la dirección del bus I2C
La dirección del bus I2C puede modificarse escribiendo una nueva dirección para el controlador MD25.
Para cambiar la dirección I2C del controlador MD25 escribiendo una nueva dirección, solo debe tener un módulo en el bus I2C. Escriba
la secuencia de 3 comandos en el orden correcto seguidos de la dirección. Ejemplo: para cambiar la dirección de un MD25 que tenga actualmente
en la dirección 0xB0 (la dirección configurada en fábrica) a 0xB4, escriba lo siguiente para la dirección 0xB0; (0xA0, 0xAA,
0xA5, 0xB4 ). Estos comandos deben enviarse en la secuencia correcta para modificar la dirección I2C. No se puede ejecutar ningún otro comando
en medio de la secuencia. La secuencia debe enviarse al registro de comandos en la ubicación 16, lo que equivale a 4 transacciones independientes
de escritura en el bus I2C. Debido al modo de operación interna de MD25, DEBE haber un retardo de al menos 5mS entre la escritura de cada una de estas
4 transacciones. Una vez transcurrido este tiempo de retardo, debería identificar el MD25 con esta dirección, sin embargo, no debe olvidar
que primero debe activarlo sin enviar comandos. MD25 parpadeará su dirección a través del LED de comunicación de color verde.
Un destello largo seguido de un número de destellos cortos indica su dirección. Se seguirá recibiendo los comandos enviados a MD25 durante
este periodo. La escritura de nuevos comandos de velocidad o escritura enviados al registro de comandos interrumpirán estos destellos.
| Dirección |
Destello largo |
Destellos cortos |
| Decimal |
Hex |
| 176 |
B0 |
1 |
0 |
| 178 |
B2 |
1 |
1 |
| 180 |
B4 |
1 |
2 |
| 182 |
B6 |
1 |
3 |
| 184 |
B8 |
1 |
4 |
| 186 |
BA |
1 |
5 |
| 188 |
BC |
1 |
6 |
| 190 |
BE |
1 |
7 |
Evite configurar más de un MD23 con la misma dirección, ya que se el bus podría colapsarse y los resultados podrían ser imprescindibles.
MD25 EN MODO SERIE
Regulación automática de velocidad
El controlador MD25 puede aumentar de forma dinámica la potencia recibiendo la información de los codificadores según sea necesario.
Si no se lograse la velocidad requerida, el controlador MD25 aumentará la potencia de los motores hasta alcanzar la velocidad deseada o hasta que
se alcance la salida máxima. La regulación de velocidad puede desactivarse a través del registro de comandos.
Parada automática del motor
El controlador MD25 detendrá automáticamente los motores si no hay comunicaciones I2C en 2 segundos. Esta función sirve para evitar
que su robot pierda el control en caso de que el controlador falle. Esta función puede desactivarse, si se desea. Consulte Registro de comandos.
Control de MD25
El MD25 está designado para operar con un bis serie a nivel TTL (Niveles de 5v). No conectar directamente al RS232 , si desea conectar al RS232
este debe ser con la ayuda de un convertidor de nivel de voltaje como un ST232, un MAX 232 o similar.
Comandos
Un grupo de comandos de uso sencillo proporciona todas las funciones que el MD25 tiene que ofrecer. Los comandos son enviados con un byte 0 de sincronismo
al comienzo y después el comando seguido por algunos bytes de datos. Entonces el MD25 responderá si el comando es aplicable.
| Comando |
Nombre |
Bytes enviados a MD25 |
Bytes devueltos por MD25 |
Descripción |
| 0x21 |
Velocidad 1 |
2 |
1 |
Devuelve la velocidad de la corriente requerida del motor 1 |
| 0x22 |
Velocidad 2 |
2 |
1 |
Devuelve la velocidad de la corriente requerida del motor 2 |
| 0x23 |
Leer Codificador 1 |
2 |
4 |
Recuento del codificador motor 1, 4 bytes devueltos primero el de mayor bytes ( con signo) |
| 0x24 |
Leer Codificador 2 |
2 |
4 |
Recuento del codificador motor 2, 4 bytes devueltos primero el de mayor bytes ( con signo) |
| 0x25 |
Leer Codificadores |
2 |
8 |
Devuelve 8 bytes - recuento codificador 1, recuento codificador 2 |
| 0x26 |
Leer Tensión |
2 |
1 |
Devuelve el nivel de entrada del voltaje de las baterías |
| 0x27 |
Leer Corriente 1 |
2 |
1 |
Devuelve la corriente consumida por el motor 1 |
| 0x28 |
Leer Corriente 2 |
2 |
1 |
Devuelve la corriente consumida por el motor 2 |
| 0x29 |
Leer Versión |
2 |
1 |
Devuelve la versión del software MD25 |
| 0x2A |
Leer Aceleración |
2 |
1 |
Devuelve el nivel de aceleración de la corriente |
| 0x2B |
Leer Modo |
2 |
1 |
Devuelve el modo de la corriente seleccionada |
| 0x2C |
Leer VI |
2 |
3 |
Devuelve los voltios de las baterías, la corriente del motor 1 y entonces la corriente del motor 2 |
| 0x31 |
Establece Velocidad 1 |
3 |
0 |
Establece una nueva velocidad1 |
| 0x32 |
Establece Velocidad 2 / GIRO |
3 |
0 |
Establece nueva velocidad 2 o giro |
| 0x33 |
Establece Aceleración |
3 |
0 |
Establece nueva aceleración |
| 0x34 |
Establece Modo |
3 |
0 |
Establece el modo |
| 0x35 |
Borrar Codificadores |
2 |
0 |
Borra los recuentos de los dos codificadores |
| 0x36 |
Deshabilita la Regulación |
2 |
0 |
La salida de los motores no cambia por la retroalimentación del codificador |
| 0x37 |
Habilita la Regulación |
2 |
0 |
la salida de los motores es regulada por la retroalimentación del codificador |
| 0x38 |
Deshabilita el TimeOut |
2 |
0 |
El MD25 continuará funcionando aunque no reciba comandos en 2 segundos |
| 0x39 |
Habilita la regulación |
2 |
0 |
El MD25 se parará después de 2 segundos sin comunicación |
Por ejemplo, para leer la tensión de las baterías hay que mandar la siguiente secuencia de Bytes.
0X00 - Byte de sincronización
0x26 - Comando de lectura de tensión
El MD 25 responde con:
0x77 - Byte de dato 77 hexadecimal que equivale a 119 en decimal = 11.9 Voltios.
Registro de Velocidad1
Dependiendo del modo en el que esté trabajando, este registro puede afectar a la velocidad de uno de los motores o de ambos. El modo 0 ó 1
sirve para establecer la velocidad y la dirección del motor 1. Cuanto más grande sea el número escrito en este registro, mayor será la
potencia aplicada al motor. El 2 ó 3 sirve para controlar la velocidad y dirección de ambos motores (puede afectar al registro de giro).
Registro de Velocidad2/Giro
El modo 0 ó 1 sirve para definir la velocidad y dirección del motor 2. En el modo 2 ó 3, la Velocidad2 se convierte en el registro de
Giro, y cualquier valor en este registro se combinará con los contenidos de Velocidad1 para controlar la dirección del dispositivo (vea a continuación).
Modo de Giro
El modo de Giro comprueba el registro de velocidad para decidir si la dirección es hacia adelante o hacia atrás. Entonces suma o resta el valor
de giro en cualquiera de los dos motores.
Por lo tanto, si la dirección es hacia adelante
la velocidad1 del motor = velocidad - giro
velocidad2 del motor = velocidad + giro
mientras que si la dirección es hacia atrás la
velocidad1 del motor = velocidad + giro
velocidad2 del motor = velocidad - giro
Si alguno de los motores no pudiera alcanzar la velocidad requerida para el giro (más allá de la salida máxima), entonces el programa
cambiará automáticamente el otro motor para que compense la diferencia necesaria.
Registros de codificador
Cada motor dispone de un recuento del codificador almacenado en matrices de 4 bytes, en forma de un número con signo de 32 bits, el recuento del codificador
se captura en una lectura del byte de nivel lógico más alto (registros 2, 6) y los siguientes bytes de nivel lógico más bajo
se retendrán hasta que se alcance la lectura del byte de nivel lógico más alto. El recuento se almacena con el byte más alto
en el byte mas bajo del correspondiente registro. Los registros pueden ponerse a cero en cualquier momento escribiendo 32 (0x20) en el Registro de comandos.
Tensión de la batería
En este registro se puede obtener una lectura de la tensión de la batería conectada. La lectura es 10 veces la tensión (121 para 12.1v).
Corriente del Motor 1 y 2
En este registro puede obtener el promedio de corriente a través del motor. La lectura es aproximadamente 10 veces el número de amperios (25
para 2.5A).
Número de revisión de Software
Este registro contiene el número de revisión del software en los módulos del controlador PIC16F873 - actualmente 1 en el momento de
la escritura.
Tasa de aceleración
Si necesita una tasa de aceleración controlada para que los motores conectados alcancen la velocidad máxima deseada, puede utilizar el registro
correspondiente del controlador MD25. Funciona utilizando un valor en el registro de aceleración e incrementando la potencia por dicho valor. Cambio
de la velocidad actual de los motores y la nueva velocidad (en los registros la velocidad 1 y 2). Si los motores trabajan a toda velocidad hacia adelante
(255) y se les da la orden de moverse a toda velocidad en dirección inversa (0), entonces habría pasos de 255 con un registro de aceleración
con un valor 1, y pasos de 128 para un valor 2. El valor por defecto de aceleración es 5, lo que significa que la velocidad se cambiará de
dirección hacia adelante a dirección hacia atrás en tan sólo 1,25 segundos. El registro aceptará valores desde 1 hasta
el 10 que equivale a un periodo de tan sólo 0,65 segundos para poder cambiar el sentido de la marcha a toda velocidad.
Utilice la siguiente fórmula para calcular el tiempo (segundos) para alcanzar la aceleración:
si la velocidad nueva es > velocidad actual
pasos = (nueva velocidad - velocidad actual) / registro de aceleración
si la velocidad nueva es < velocidad actual
pasos = (velocidad actual - nueva velocidad) / registro de aceleración
tiempot = pasos * 25ms
Por ejemplo::
| Registro de aceleración |
Tiempo/Paso |
Velocidad actual |
Nueva velocidad |
Pasos |
Tiempo de aceleración |
| 1 |
25 ms |
0 |
255 |
255 |
6.375 |
| 2 |
25 ms |
127 |
255 |
64 |
1,6 seg |
| 3 |
25 ms |
80 |
0 |
27 |
0,675 seg |
| 5 (por defecto) |
25 ms |
0 |
255 |
51 |
1,275 seg |
| 10 |
25 ms |
255 |
0 |
26 |
0,65 seg |
Registro de modo
El registro de modo selecciona el modo de operación y el tipo de entrada de datos I2C que requiere el usuario. Las opciones son:
0, (Valor por defecto) Si se escribe un valor 0 en el registro de modo, entonces el significado de la velocidad será una velocidad literal
en el rango de 0 (Marcha atrás) 128 (Parada) 255 (Marcha hacia delante).
1, El Modo 1 es similar al Modo 0, salvo en que los registros de velocidad se interpretan como valores con signo. El significado de los registros
de velocidad es la velocidad literal en el rango -128 (Marcha hacia delante) 0 (Parada) 127 (Marcha hacia delante).
2, Si se escribe un valor 2 en el registro de modo, la velocidad1 controlará la velocidad de ambos motores, y velocidad2 se convierte
en la velocidad de giro.
Los datos están en el rango entre 0 (Marcha hacia atrás) 128 (Parada) 255 (Marcha hacia delante).
3, El Modo 3 es similar al Modo 2, salvo en que los registros de velocidad se interpretan como valores con signo.
Los datos están en el rango entre -128 (Marcha hacia atrás) 0 (Parada) 127 (Marcha hacia adelante)
Get VI
Este comando da las ordenes al MD25 para que enviar la lectura de la tensión de la batería ( 125= 12,5 v) y luego la corriente consumida por
el motor 1 ( 1 recuento por cada 100mA) y finalmente la corriente consumida por el motor 2.
Dimensiones

Haga clic en el botón COMPRAR para añadir este producto a su carrito de la compra.
92,65-Euros.
IVA incluido
|
CONTROLADOR MOTORES DC DOBLE 2,8 + 2,8 AMPERIOS MD25
Vea mas productos de esta categoría en:
Controladores de Motores
Ir a la Página Principal de www.SuperRobotica.com
Actualizada el 09/01/2026 © 2002 -2026 INTPLUS ®. Todos los derechos reservados
|