|
Introducción
El MD03 es un controlador de motor de corriente continua de mediana potencia, diseñado para proporcionar mas
potencia que los controladores basados en un único circuito integrado. Las principales características
son la facilidad de uso y la flexibilidad. La potencia del motor es controlada mediante Modulación de Anchura
del Pulso (PWM) del puente en H a una frecuencia de 7,8Khz.
Los 15V de la tensión de control del MOSFET se genera en el mismo circuito mediante una bomba de carga, por
lo que solo se requieren 5V a 50 mA para la alimentación del circuito, además de la alimentación
del motor que esta comprendida entre los 5 y los 24V dependiendo de los requerimientos del motor.
El modulo puede controlarse de 5 formas diferentes:
- Modo bus I2C. Hasta ocho módulos MD03 con direcciones seleccionables mediante micro interruptores.
- Entrada analógica 0V - 2.5V - 5V. 0V un sentido, 2,5V parado y 5V la otra dirección.
- Entrada analógica 0v - 5v. para control de la velocidad con control independiente de la dirección.
- Modo RC. Para controlarlo directamente desde un receptor de radio control estándar.
- Señal PWM que gracias al filtro incorporado puede usar entre 0% y 100% con una frecuencia de 20Khz o mas.
ATENCION ESTA PAGINA ES UNA TRADUCCION DE LA PAGINA ORIGINAL DEL FABRICANTE Y CONTIENE TODA LA DOCUMENTACIÓN
EXISTENTE SOBRE EL CIRCUITO CONTROLADO DE MOTORES MD03.
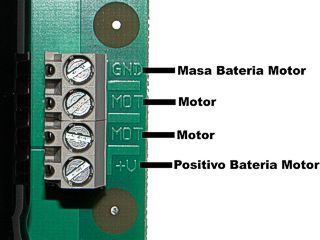
Conexiones del Motor
Recuerde utilizar siempre cables con una sección adecuada a la potencia del motor para hacer las conexiones
del motor y de la batería. Igualmente es IMPRESCINDIBLE COLOCAR UN FUSIBLE EN EL CABLE
QUE SE CONECTA EN EL POSITIVO DE LA BATERIA O FUENTE DE ALIMENTACION DEL MOTOR. NO IGNORE ESTA ADVERTENCIA YA QUE LAS
ALTAS CORRIENTES QUE SE MANEJAN PUEDEN SER PELIGROSAS Y CAUSAR UN INCENDIO EN CASO DE CORTOCIRCUITO.
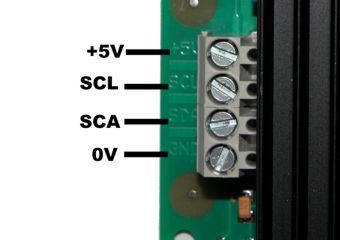
Conexiones del Control
Las conexiones indicadas en el circuito impreso son las correspondientes al modo I2C del controlador MD03. para las
conexiones de los otros modos de funcionamiento, lea el texto mas adelante.
Modos de Funcionamiento
El circuito controlador de motores MD03 tiene 5 modos diferente de funcionamiento que son:
Modo Analógico 0V - 2,5V - 5V
En este modo, el motor es controlado por una señal analógica de 0 a 5 voltios en la entrada SDA. La entrada
SCL no se utiliza y debe ser conectada a 0v o a +5V. En este modo 0V es el máximo en un sentido, 2,5V es la posición
central de reposo o posición de parada y 5V corresponde al máximo en el otro sentido.
Hay una pequeña zona muerta de un 2,7% de ancho en la zona central, para proporcionar una zona de apagado estable.
La impedancia de entrada es de 47K.
Modo Analógico 0V - 5V
En este modo el motor es controlado por una señal analógica de entre 0V y 5V conectada a la entrada SDA
y la dirección se controla mediante el nivel lógico de la entrada SCL. Cuando esta a 0 gira en un sentido
y cuando esta a 1 en el otro. 0V corresponde a parada y 5V a la máxima potencia. También puede emplear
una señal de modulación de anchura de pulso PWM en lugar de la señal analógica en la línea
SDA. Hay un sencillo filtro formado por condensador y una resistencia capaz de generar la tensión analógica
desde la señal PWM. La señal PWM debe ser de 20Khz o superior e idealmente procedente de una puerta CMOS
(0-5V) mejor que de una TTL (0-3,5V). Un ciclo de trabajo de 0% representa 0V y un ciclo de 100% representan 5V. Esto
es valido para los dos modos analógicos anteriores.
Modo RC (radio control)
Este modo permite la conexión directa a un receptor de radio control estándar., es decir que se controla
como si fuera un servo. La mayoría de los receptores comerciales trabajan con un paquete de baterías de
4,8 a 6V y pueden ser alimentados por los mismos 5V empleados para alimentar el circuito controlador de motores MD03.
El pulso de control (amarillo en muchos servos) del receptor debe conectarse al terminal SDA. El terminal SCL no se
utiliza y debe conectarse a 0V o a 5V. COnecte el cable de alimentación (rojo) del receptor al terminal de +5V
y el cable de tierra (negro) al terminal de tierra del modulo controlador.
La salida del receptor es un pulso alto de 1,5 ms de ancho cuando el joystick esta en el centro. El rango varia desde
1,1ms hasta los 1,9 ms cuando se mueve la palanca de control. EL rango puede ser desplazado desde su centro en +-100uS
desde 1mS - 1,8mS a 1,2mS - 2mS. El circuito MD03 proporciona un control total en el rango desde 1,1mS hasta los 1,9mS
siendo 1,5mS la zona central correspondiente a la parada. Hay una zona muerta de 7uS entorno a la zona central para
facilitar la posición de parada. El control de centrado del radio transmisor deberá ajustarse de forma
que el motor este parado cuando la palanca de control este en su posición de reposo.
Modo I2C
El modo I2C permite conectar el circuito controlador MD03 a controladores como el Basicx24, el OOPic y el Basic Stamp
por citar solo unos cuantos o bien a microcontroladores como PIC, 8051, H8, etc. Consulte la sección de ejemplos
para ver como conectar el modulo a alguno de estos controladores.
El protocolo de comunicación I2C del circuito controlador MD03 es el mismo que el empleado en las conocidas
eeprom como la 24C04. Para leer uno o mas registros del MD03, primero se envía un bit de comienzo seguido de
la dirección. del modulo (0XB0 es la dirección base del modulo) con el bit de lectura/escritura puesto
a cero. Después se manda el numero del registro que desea leer seguido de nuevo de un bit de comienzo y otra
vez la dirección del modulo con el bit lectura/escritura puesto a 1(0Xb1). Ahora puede leer uno o mas registros.
Registros del Modo I2C
El MD03 tiene 8 registros numerados del 0 al 7 tal y como se muestran en la siguiente tabla.
| Dirección Registro |
Nombre |
LecturaR / EscrituraW |
Descripción |
| 0 |
Comando |
R/W |
Escritura 01 Adelante- 02 Atrás
(00 Frenado - Solo para firmware Rev 09) |
| 1 |
Estado |
Lectura |
Aceleración, Temperatura y Estado actual |
| 2 |
Velocidad |
R/W |
Velocidad del Motor 0-255 (0x00 - 0xFF) |
| 3 |
Aceleración |
R/W |
Aceleración del Motor 0-255 (0x00 - 0xFF) |
| 4 |
Temperatura |
Lectura |
Temperatura de Módulo |
| 5 |
Corriente Motor |
Lectura |
Corriente del Motor |
| 6 |
Sin Usar |
Lectura |
Devuelve 0 |
| 7 |
Versión |
Lectura |
Número de Revisión del Software - Actualmente 9 |
Registro de Comando
Controla la puesta en marcha y la parada del motor, así como el sentido de rotación. Escribiendo un 1
el motor gira hacia adelante, escribiendo un 2 gira hacia Atrás y escribiendo un 0 para el motor frenándolo
instantáneamente (solo en la versión 9 del software). Compruebe que ha establecido primero la velocidad
y la aceleración antes de escribir este registro. No escriba 0 en este registro para parar el motor con las versiones
de software anteriores a la 9.
Nota: En todas las versiones, la forma de parar el motor es igual que cambiar la velocidad del motor. Escriba la nueva
velocidad en el registro 2 y vuelva a mandar el comando de dirección. Esto hará que el motor desacelere
hasta pararse a la velocidad indicada en el registro de aceleración En la revisión 9, escribiendo un 0
en el registro de comando, se consigue que el motor se pare instantáneamente independientemente de lo que indique
el registro de aceleración.
Registro de Estado
Este registro muestra el estado del circuito controlador de motores MD03 de acuerdo a la siguiente tabla:
| Bit 7 (msb) |
6 |
5 |
4 |
3 |
2 |
1 |
Bit 0 (lsb) |
| Ocupado |
- |
- |
- |
- |
Limitador Exceso Temperatura |
Limitador Exceso Corriente |
Acelerando |
El Bit 0 se lee como alto cuando el circuito esta todavía acelerando el motor hasta la velocidad establecida.
Es bajo cuando se ha alcanzado la velocidad, o bien se ha sobrepasado el limite de corriente o de velocidad.
El Bit 1 se pone alto para indicar que la corriente a través del motor ha alcanzado los 20 Amperios y esta limitada
ha este valor. Cuando esto ocurre, se enciende el led rojo También
El Bit 2 se pone alto para indicar un exceso de temperatura. Cuando se sobrepasa el nivel de temperatura establecido,
la corriente del motor es reducida de acuerdo con el nivel de temperatura del circuito MD03. El modulo todavía
funcionará, pero la corriente será limitada. En este caso También se iluminará el led rojo.
Tenga en cuenta que un funcionamiento de varios minutos a 20 A hacen que se caliente bastante el refrigerador del circuito.
Tenga cuidado de no quemarse.
El Bit7 es el indicador de ocupado del circuito. Cuando esta alto, cada vez que se envía un comando al circuito,
pasando a nivel bajo muy rápidamente, por lo que no es fácil verlo a nivel alto.
Registro de Velocidad
Establece la máxima velocidad a la que girará el motor. Este valor se corresponde con el valor de 8 bit
enviado a los controladores PWM. Los valores admitidos van del 0 al 243 (los números entre 243 y 255 son limitados
a 243). Cuanto mayor sea el numero, mas potencia es aplicada al motor.
Registro de Aceleración
Este registro establece el ratio a la que el motor acelera o desacelera desde su velocidad actual hasta la velocidad
indicada en el Registro de Velocidad. Los valores admitidos son de 0 a 255 y cuanto mayor sea este valor mas tiempo
tardara el motor en alcanzar la velocidad indicada. Escribiendo un cero en este registro, se consigue la máxima
aceleración desde 0 al máximo en 0,187 segundos. El valor introducido controla un temporizador que escalona
la potencia del motor hasta conseguir la velocidad deseada. El intervalo entre los escalones es de ((Registro de Aceleración)*125)+768
µS. Un valor de 0 equivale a 0,187 segundos, mientras que un valor de 255 equivale a 7,93 segundos.
Registro de Temperatura
Este se registro se corresponde con un valor interno utilizado para limitar la corriente del motor si el modulo se
calienta en exceso, por lo que no hay que hacer nada con el. Su lectura no se corresponde con grados centígrados,
por el contrario su valor disminuye cuando aumenta la temperatura. La medición se realiza midiendo la caída
de tensión de un diodo situado bajo la resistencia de 0,003 ohmios que se utiliza como sensor de corriente. El
valor disminuye en una unidad por cada 1,42 grados C.
Registro de Corriente del Motor
Su valor se corresponde con un valor interno utilizado para limitar la corriente del motor a 20A, por lo que no necesario
leerlo ni hacer nada con el. El valor es proporcional a la corriente del motor con un valor de 186 representando el
límite de 20A.
Registro de Versión del Software
La lectura de este registro devuelve el valor del software del microcontrolador PIC16F872 que lleva el MD03. La versión
actual a la fecha del 15 de Agosto del 2002 es la 09.
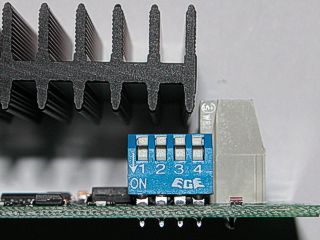
Modos de Funcionamiento
Hay cuatro micro interruptores numerados del 1 al 4 que se utilizan para establecer el modo de funcionamiento y en
su caso la dirección del modulo dentro del bus I2C según se muestra en la siguiente tabla.
| Modo |
1 |
2 |
3 |
4 |
| Dirección. Bus I2C 0xB0 |
On |
On |
On |
On |
| Dirección. Bus I2C 0xB2 |
Off |
On |
On |
On |
| Dirección. Bus I2C 0xB4 |
On |
Off |
On |
On |
| Dirección. Bus I2C 0xB6 |
Off |
Off |
On |
On |
| Dirección. Bus I2C 0xB8 |
On |
On |
Off |
On |
| Dirección. Bus I2C 0xBA |
Off |
On |
Off |
On |
| Dirección. Bus I2C 0xBC |
On |
Off |
Off |
On |
| Dirección. Bus I2C 0xBE |
Off |
Off |
Off |
On |
| 0v - 2.5v - 5v Analógico |
On |
On |
On |
Off |
| 0v - 5v Analógico + Dirección |
Off |
On |
On |
Off |
| Radio Control |
On |
Off |
On |
Off |
Las demás combinaciones no son validas y si se establecieran el led parpadeará y no ocurrirá
nada mas. Fíjese que las direcciones I2C corresponden a los 7 bits superiores. El bit 0 se emplea como bit de
lectura / Escritura (R/W). De esta forma las direcciones 0XB0/0XB1 corresponden a la misma dirección. pero de
escritura y lectura respectivamente.
Utilización del circuito controlador de motores MD03
El MD03 puede manejar grandes corrientes, por lo que es necesario tomar algunas precauciones al hacer el cableado.
Es muy importante evitar que la corriente del motor retorne al circuito lógico a través de la masa. Esto
quiere decir que no asuma que por el hecho de que se alimenta con una batería., las masas del circuito y del
motor van juntas. Siempre que sea posible utilice dos baterías distintas para alimentar el motor y la electrónica.
Tampoco conecte la masa de las baterías juntas, ya que esto se hace en el propio circuito impreso del controlador
MD03, y si lo hiciera crearía un bucle de retorno de tierra con los consiguientes problemas. El diagrama de abajo
muestra de forma general como mantener la alimentación del motor y de la electrónica. eléctrica
y físicamente separadas una de otra.
Utilización en modo analógico para controlarlo con un potenciómetro
Dimensiones y Medidas
El siguiente dibujo muestra las medidas de los taladros de montaje del circuito MD03
Esquemas
Los esquemas del circuito controlador de motores MD03 en formato GIF puede verlos en estos enlaces md3sch1 md03sch2
Código de la CPU
Para aquellos que lo deseen y sean capaces de reprogramar el PIC16F872, aquí esta el código en formato
Hexadecimal Hex (Revisión 10)

Haga clic en el botón COMPRAR para añadir este producto a su carrito de la compra.
67,75-Euros.
IVA incluido
|
CONTROLADOR MOTORES DC 20 AMP MD03
Vea mas productos de esta categoría en:
Controladores de Motores
Ir a la Página Principal de www.SuperRobotica.com
Actualizada el 09/01/2026 © 2002 -2026 INTPLUS ®. Todos los derechos reservados
|